
電通大杯 ヒト型レスキューロボットコンテスト 2014 公式レポート
大阪電気通信大学 自由工房ヒト型プロジェクト 技術講師
福田拡司
去る11月2日、大阪電気通信大学 駅前キャンバスにて「電通大杯ヒト型レスキューロボットコンテスト 2014」が開催された。
このコンテストはヒト型のロボットによる災害救助をテーマとしており、今年で6回目の開催となる。毎年様々な工夫を凝らしたロボットが参加し、今年は15体のロボットがエントリー、12体が競技に参加した。(画像1)
昨年に引き続き、ロボットに搭載したカメラからの映像で操縦する「搭載カメラ部門」と目視による操縦となる「目視部門」の2部門でコンテストが行われ、目視部門の優勝は「アクアレイザーRX」、搭載カメラ部門の優勝は「RB2000SF」となった。また、獲得した総合得点が最も高い人に授与される電通大杯は「アクアレイザーRX」に贈られた。

画像1:本コンテストに参加したロボットと参加者の皆様
競技概要とルール
本コンテストは、2000年から毎年神戸で行われているレスキューロボットコンテストから派生したものである。共にロボットを通じて防災・減災に関心を持ってもらうというテーマが根幹にあり、異なる競技形態となっている。
本家のレスキューロボットコンテストは、10人ほどで構成されるチームと複数台の大型ロボットを用いて競技を行う。そのため規模が大掛かりとなり個人参加の難しいものとなっている。逆に本コンテストは、規定に沿ったヒト型ロボット1台で参加でき、1人でも参加することが可能である。
本家のレスキューロボットコンテスト、ヒト型レスコン共に被災地を模したフィールドで要救助者役の人形を救出し、ゴールに向かう。もちろん早くゴールするに越したことはないが、それだけで解決するほど競技は易しいものではない。早く目的地に辿り着いても要救助者がより負傷しまっては本末転倒である。ただゴールに早く向かうだけでなく、安全に要救助者を助けることができるかという救助時の「やさしさ」も評価の対象になっている。
本家のレスキューロボットコンテストでは、要救助者役の人形にセンサが内蔵されており、優しく救助されているかに敏感に反応する。それに対して、ヒト型レスコンの要救助者はセンサを搭載していない市販のデッサン人形で軽い。救助活動に入るまでも小さな台が置かれ、障害物競争のような印象を与える。本家よりは規模が小さいため簡単そうに見えるが、障害物や要救助者の大きさは、人のサイズで考えると人の身長の半分程になる。ヒト型ロボットにとって、障害を乗り越えたり、要救助者を指定位置まで抱えて搬送するのは大仕事なのだ。迅速に、安全に、効率よく救助できるか。ヒト型レスコンではこれらを審査員の方が採点し、点数の高さを競う。
競技フィールド
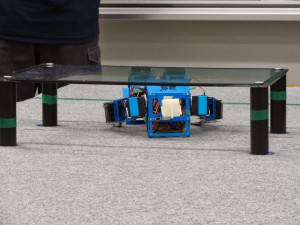
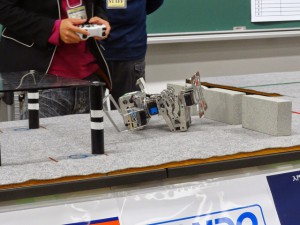
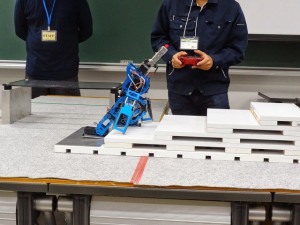
実際に競技が行われるヒト型レスコンのフィールドは下記画像のようなコースとなり、操縦者を囲むようにコの字型のコースが設置され、薄いパンチカーペットが敷かれている。(画像2)そこにトンネル、段差、行く手を阻むガレキといった障害物が置かれており、これらをロボットを操縦して突破する。その先には要救助者を模した人形がガレキに埋もれているため、ガレキを除去して人形を助けだし、ゴールに搬送するという流れとなっている。(画像3)

画像2:競技フィールドの写真
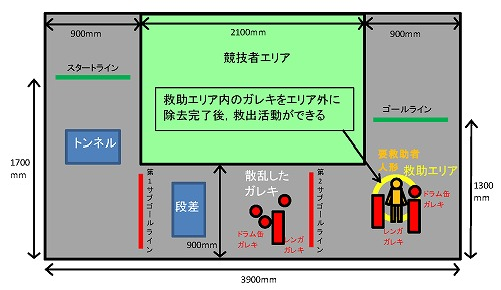
画像3:競技フィールドの画像
ロボットごとに異なる救助活動
前述したコースは、ヒト型ロボットには簡単に走破できるようにはなっていない。
ヒト型ロボットが本来歩きやすいフィールドとは水平で平らな床である。人間には何ともないパンチカーペットの床でさえも、ヒト型ロボットにとっては足を取られ、バランスを崩されるとんでもない悪路なのだ。
加えて、人間よりも少ない関節数で競技に臨まないといけない。例えば、人間なら腕だけでも指、手首、肘、肩があるが、ロボットには手首や指が動かないものがほとんどである。足や胴体も人より関節が少ないため、ロボットならではの動きを作ってトンネルをくぐり、台を登り、ガレキを除去して、要救助者の搬送を行わなければならない。
市販のロボットキットにはサンプルの動作が付属しているが、パンチカーペットを歩いたり、台を上り下りするものは一切ない。そのため動作を自分で作る必要があるが、位置調整のための動作や関節のモータに過大な負荷にかけないことを考えなくてはいけない。また、アナログスティックによる微調整を可能にする、状況に応じて複数のモーションを使い分けるなど、自分のロボットでできることを把握したうえで、そのポテンシャルを最大限に引き出せるよう考える
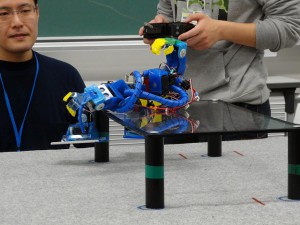
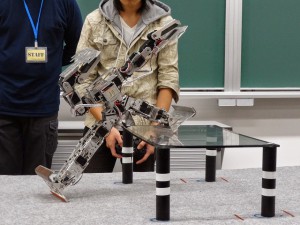
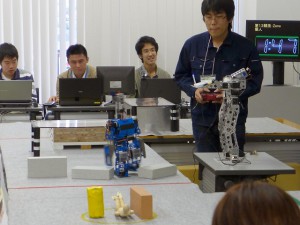
そこで、各参加者とロボットは、それぞれ救助のために作戦を立て、動作を作り、練習を重ねて競技に臨む(画像4、画像5)。ロボットの動作、各障害物への対応方法や救助方法も、三者三様である。

画像4:控え室で、作戦に沿った調整を行うチーム

画像5:控え室で、作戦に沿った調整を行うチーム
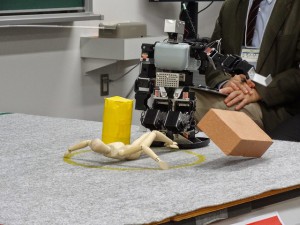
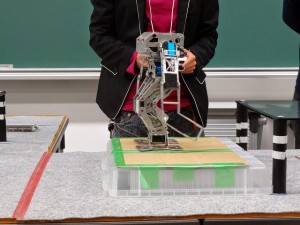
競技を開始する前には、要救助者を模したデッサン人形救助エリア内に配置する。救助エリア内であれば、操縦者は人形のポーズを好きに整えてよい(ただし、人形の腰パーツが床面と接するようにしなければならない)。(画像6)
その後、審判が要救助者の周りにガレキをランダムに設置する。実際の災害現場同様、どのような状況でもガレキ除去に対応した戦略が求められる。

画像6:デッサン人形を調節する選手
この後、操縦者は緑のスタートラインに自分のロボットを立たせ、審判の号令で競技を開始する。
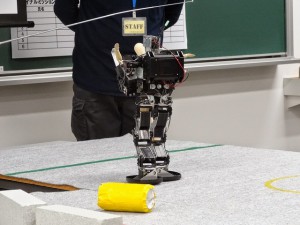
最初の障害物としてトンネルがあり、各ロボットはトンネルに見立てた台をくぐっていく。ロボットに合わせた台を事前に選択可能であるが、そのまま歩いて突破できる高さは存在しない。ロボットは一旦地面に寝そべり、うつ伏せからのほふく前進や、仰向け姿勢から足による押し出しといった方法などで進まなければならない。(画像7、画像8)
画像7:トンネルをくぐるロボット。真っ直ぐ進まないときや、台の足に引っかかることもある。

画像8:トンネルをくぐるロボット。真っ直ぐ進まないときや、台の足に引っかかることもある。
トンネルをくぐると、次に行く手を阻むのはトンネルと同じ台だ。今度はこれを乗り越えていかなければならない。高さはトンネルのときに使用したものと同じなので、高い台を選択したロボットは、乗り越える台も高いものになってしまう。
この障害物に対して、台に腰を下ろし足を徐々に動かしたり、足を大きく持ち上げて台によじ登ったりと様々な手法が用いられた。(画像9、画像10、画像11)
画像9:台に背中をつけ、足を動かして台の上で向きを変える

画像10:台の上に腹這いになるように倒れこんでから登るロボットもいた
画像11:股を大きく開き、片方の足を台にかけて登る方法もある。人間でもつらい姿勢であり、ロボットの股の関節には過大な負荷がかかる
また、登った後は台から降りなければならない。慎重に地面に足をつけて降りたり、自らへのダメージを気にせず落下したりとロボットによって対応は別れた。(画像12、画像13)

画像12:足を地面につけ、慎重に台から降りるロボット。
画像13:損害を気にせず、台から落下して降りるロボット。
台を乗り換えた先の道は、ガレキで塞がれている。要救助者の元に辿り着くには、ガレキを突破する必要がある。(画像14)
画像14:道を塞ぐガレキを突破。ここを超えるといよいよ救助活動だ。
道を塞ぐガレキを突破すると、要救助者の元にたどり着くことができる。ただ、要救助者はガレキに埋もれている設定なので要救助者の周りにはガレキが置かれている。これらを救助エリア(直径32cmの円)の外に出し、要救助者を救助できる状態にしなければならない。(画像15、画像16)
画像15:ガレキの除去を行うロボット。要救助者の上に落とさないよう、慎重に操作する必要がある。
画像16:ロボットのパンチでガレキを外に出す。変にガレキを抱え上げると要救助者に当たってしまうとき使われる。
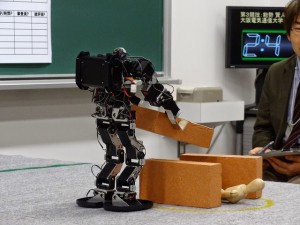
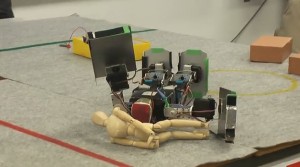
ガレキの除去が審判によって確認されると、いよいよ救助活動となる。要救助者をお姫様抱っこの要領で抱え上げる、後ろから抱き上げるといった方法があるが、肝心なのは「やさしく」救助することだ。(画像17~画像21)
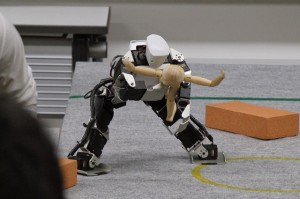
画像17:寝そべっていた要救助者を抱き上げるロボット。
画像18:腕を抱え込み、持ち上げるロボット

画像19:腕の隙間に要救助者の頭と足を入れ、抱え上げるロボット

画像20:救助後にバランスを崩してしまい…
画像21:要救助者ごと後ろに倒れてしまった!こうなってしまうと何のためにここまで来たのか分からない。
要救助者を抱えた後は、ゴールラインまで要救助者を搬送する。要救助者に負担を与えないよう、各ロボットはあまり要救助者を揺らさないよう慎重になる。そのため各ロボットはゆっくり歩いてと搬送していく。(画像22)
画像22:ゴール目前。要救助者の搬送時は、歩くスピードが落ちるために時間との戦いにもなる。
ロボットと道具
ヒト型レスキューロボットコンテストには、ロボット1台で参加することが可能だが、操縦者は競技フィールドに最大3つまで「道具」を持ち込むことができる。道具を使用することで、効率よく障害を乗り越えたり、採点時に得点がもらえたりとメリットは大きい。
本コンテストでは過去のコンテストに比べ、道具の利用率が大幅に増加した。大掛かりな道具が登場したり、台から降りることや要救助者の搬送をサポートする道具が初登場と、本コンテストの見所の1つとなっている。
過去のコンテストでは、ロボットの身一つで競技に臨む者が多く、道具を使用するのは決まって1、2台で少数派であった。その道具というのも、台車を用意してそれに寝そべり、台くぐりを効率的に行う手法、台乗り越えの際に土台を用意してスムーズに台に登る手法が中心であった。(画像23)

画像23:台車に寝そべり、足の力と台車の車輪を利用して素早く台をくぐる、台車の大きさはロボットによってさまざま。
Antlionは追加で台を1つ設置した。階段となるように設置することで、1段の高さを低くすることが狙いだ。こうすることで、登れない高さの台を乗り越えることができる。(画像24)
画像24:階段のように設置。台を乗り越える際の高さが低くなる。
RB2000SFは台乗り越えのスペースいっぱいの階段を設置。階段を1段1段登っていくことで想定外のトラブルに阻まれない、安定した動きで台に登っていった。(画像25)
画像25:段数は多いが、階段自体が大きいため位置取りにはあまり時間がかからない。
RB2000SFが用意した道具はこれでだけでない。台くぐりに使われる台の隙間にアルミ板を設置し、台と台の間に腕が引っかからないようにしていた。(画像26)
画像26: 赤丸で囲んだものが、台くぐりでロボットの腕を台に引っかからないようにする道具
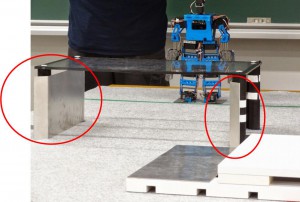
トランザーは台から降りるところにスロープを設置した。他のロボットが台から慎重に降りたり、損傷を恐れず落ちたりしている中、トランザーはスロープを利用し、腹ばいで滑り降りる方法を用いた。他のロボットが台のそばに慎重に降りる中、トランザーはスロープで勢い良く下っていき、勢い余ってその先のガレキまで弾き飛ばしていった。(画像27)

画像27:赤丸で囲んだのが、台から降りる際にトランザーが使用するスロープ。スロープで滑ることにより、移動距離を稼ぎ、なおかつ素早い移動を実現。
ゲッターン1は搬送用の簡易タンカを用意していた。これを要救助者の下に潜り込ませ、タンカを足で押していく手法を考えていたのだが、残念ながら救助中にタイムアップを迎えてしまい、ゴールまでたどり着くことができなかった。(画像28)

画像28:赤丸で囲んだものを要救助者の下に潜り込ませる。
本コンテストではロボット1台につき多くても持ち込んだ道具は2つであった。今後は規定の3つまで道具を用意して競技に臨んだり、今回のように創意工夫を凝らした道具が登場するだろう。
カメラ操縦について
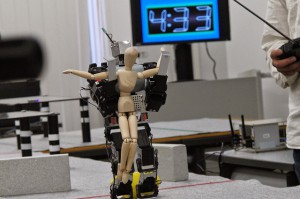
ファーストミッションで上位に入った者はファイナルミッションに挑む。ファーストミッションと比べ、ファイナルミッションは除去するガレキの数が増加し、要救助者の救助が難しくなる。また、ファーストミッションでは目視で操縦していたがファイナルミッションでは目視部門と搭載カメラ部門に分かれる。目視部門はガレキの増加のみだが、搭載カメラ部門はガレキ増加に加え、ロボットを直接見ず、ロボットに搭載されたカメラからの映像を頼りに、ロボットを操縦して競技を行うことになる。(画像29)

画像29:ロボットのカメラから送られてきた映像は、会場のスクリーンに大きく表示され、観客もロボットの視点を共有できる。
目視での操縦と比べると難易度が高いため、搭載カメラ部門では制限時間が6分から9分に変更される。しかし、時間が延びてもゴールまで辿り着くことは難しい。操縦のヒントになってしまうため、観客は「落ちそう」といったヒントになるような声援を禁止されている。ゆえに、観客の反応を便りに操縦するということもできない。また、カメラからの映像は視野が狭くなり、周囲の状況把握が難しくなっている。ロボットが倒れてカメラが上を向いてしまった場合が最も大変で、カメラに映るのは部屋の天井となり、自分がフィールドのどの位置で倒れているか把握するのが困難となる。
ファイナルミッションでカメラを使用したロボットは2台であった。ここではそのロボットを紹介する。
KIT-ロボは、頭と腰にピンホールカメラを搭載し、2つのカメラの画像を見ながら競技に臨んでいた。頭を左右に動かすことで、カメラに映る映像を調整できるが、頭のカメラを左右に動かしてもそこに映るのは胸部のボディーカバーのみであった。このため、KIT-ロボはカメラを動かさず競技に臨むことになった。結果、自分の足元しか映らず、周りの状況を把握するのに苦労していた。(画像30)
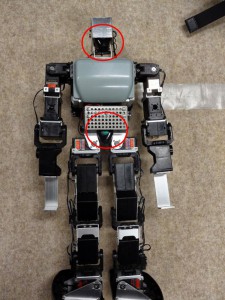
画像30:カメラは赤丸で囲んだところに搭載されている。
RB2000SFは、鉄道模型に使われるトレインスコープと呼ばれる超小型カメラをロボット頭部に搭載していた。この頭部は、前後左右に動くようにサーボモータが2軸付いており、足元やロボットハンドの先を自由に確認しやすくなっている。(画像31)
またRB2000SFの操縦者のzeno氏は、もう1台ロボットを持ち込んでいた。ヒト型レスキューロボットコンテストに出れないほどの巨体であり、手にはトレインスコープの受信機が乗っている。レスキュー用のこのロボットが手を動かすことで、アンテナの向きを調整してトレインスコープからの映像を安定して受信できる位置にしている。zeno氏はRB2000SFを操縦に加え、この巨大ロボットも操縦し受信機のアンテナの位置を調整していた、このロボットは大会のために新造したロボットではなく、ヒト型ロボットを戦わせる「第25回 ROBO-ONE」という大会で優勝したロボットを使用している。(画像32)

画像31: RB2000SFのカメラ操縦。スクリーンにはロボットの手元と、抱えているガレキが映っている。
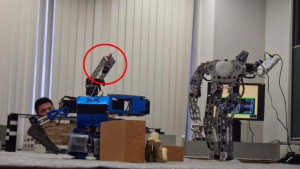
画像32:カメラは赤丸で囲んだところに搭載している。なお奥に立っている銀色で巨大なロボットが、カメラの受信機を持つバトル用ロボットだ。
総括
競技完了後、表彰式が行われ、その中で審査委員長である横小路先生は「ヒト型レスコンは、ロボットがヒト型であるため観客が感情移入しやすく、見ていて分かりやすいといったヒト型ならではの面白さがある。ただ、カメラ縦に挑戦者が少ないためもっと挑戦して欲しい。運営側も搭載カメラ部門に挑戦しやすいよう工夫する必要がある」とコメント。
升谷実行委員長は「全部のロボットが救助に成功し、そのタイムで競い合ってほしい。また、上手くいく方法やコツはノウハウとして皆で共有できるようにしていきたい。」とコメントした。
本家のレスキューロボットコンテストとは似ているようで、ヒト型ならではの救助活動が繰り広げられる本コンテスト。人間みたいな力も動きも持たないヒト型ロボットの救助活動に観客も見入っていく。(画像33)

画像33:ヒト型レスコン会場の様子
ヒト型レスキューロボットコンテストが今後も続くことによって、ヒト型ロボット同士のバトルともまた違う、ヒト型ロボットの新しい可能性が引き出されていくだろう。
