
大電通コマドリ-改 2013 事例紹介
このページは、2013に参加した大阪電気通信大学 自由工房の近藤 吏さんと、2012に参加した同 中村 介さんからいただいた情報を基に作成しました。
ロボット


本体
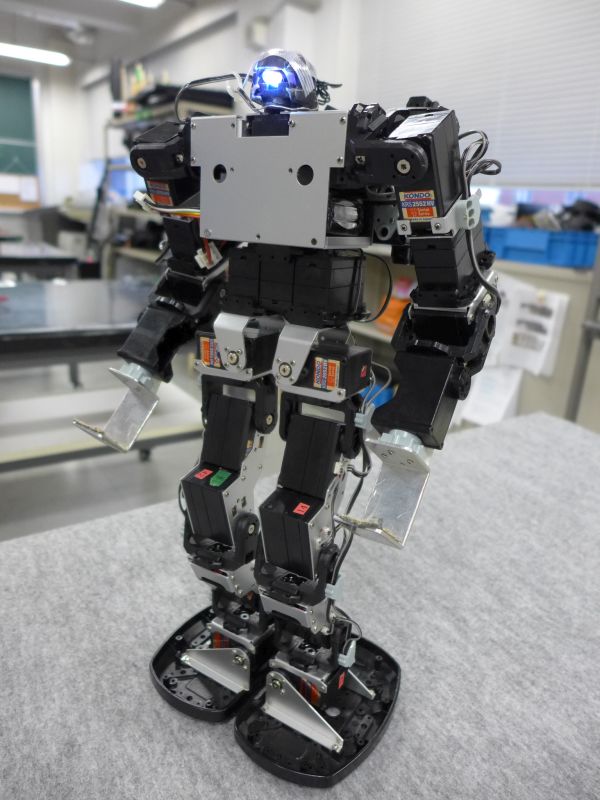
近藤科学のKHR-3HVに拡張用サーボ5個セットを追加しています。腕4軸、脚6軸、腰ヨー軸の21軸。首のヨー軸は使っていません。頭を付け替えていますが、レスキューには意味がありません。腕の先にコの字型のアルミ製の手を付けています。足裏の内側にビニルテープを貼って摩擦を調整しています。
コントローラ
近藤科学のKRC-1無線コントロールユニットセットを使っています。
道具
トンネルくぐりのために、ロボットが仰向けに乗ることができる台車を使っています。
モーション
- daidentsu2013project.zip(HeartToHeart4 バージョン1.2.2用モーションとプロジェクト)
近藤科学のHeartToHeart4のバージョン1.2.2を使っています。公開に先立ち、最新バージョン用に変換してみましたが、まだうまく動いていません。
概説
| キー | 説明 |
|---|---|
| ↑ | 前進 |
| ↓ | 後退 |
| ← | 左移動 |
| → | 右移動 |
| S1+↑ | 微小前進 |
| S1+↓ | 微小後退 |
| S1+← | 微小左移動 |
| S1+→ | 微小右移動 |
| S2 | 左旋回 |
| S4 | 右旋回 |
| 3 | 方向判定起き上がり 「うつ伏せからか起き上がり」か「仰向けからかの起き上がり」 |
| C | 台車でトンネルくぐり 仰向けになり入力待ち ○でフィールド面を足で蹴って進み入力待ち ×で終了 |
| A | 救助 かがんで要救助者を持ち上げて入力待ち A右に横移動して入力待ち S2左旋回して入力待ち S4右旋回して入力待ち ×立ち上がって終了 |
| B | ホームポジション |
| D | 段差乗り越え 段の上に上がって入力待ち Dを押し続けると段上での移動する それ以外で段から下りる |
| △ | 高い位置のガレキ除去 ガレキを挟んで持ち上げて入力待ち ○で右へ投げる □で左へ投げる |
| × | 低い位置のガレキ除去 ガレキを挟んで持ち上げて入力待ち ○で右へ投げる □で左へ投げる |
| □ | かがんでガレキを左へ押す 右腕を前に出しかがんで入力待ち □を押し続けるとかがんだまま左へ移動する それ以外で立ち上がり終了 |
| ○ | かがんでガレキを右へ押す 左腕を前に出しかがんで入力待ち 〇を押し続けるとかがんだまま右へ移動する それ以外で立ち上がり終了 |
動画(YouTube)
デモ
- 左右移動
- 左右旋回
- 低い位置のガレキ除去
- 高い位置のガレキ除去
- かがんでガレキを右へ押す
- かがんでガレキを左へ押す
- うつ伏せからの起き上がり
- 仰向けからの起き上がり
- トンネルくぐり
- 段差乗り越え
- 救助・搬送
