
OECU杯 ヒト型レスキューロボットコンテスト 2016 有線カメラ事例
概要
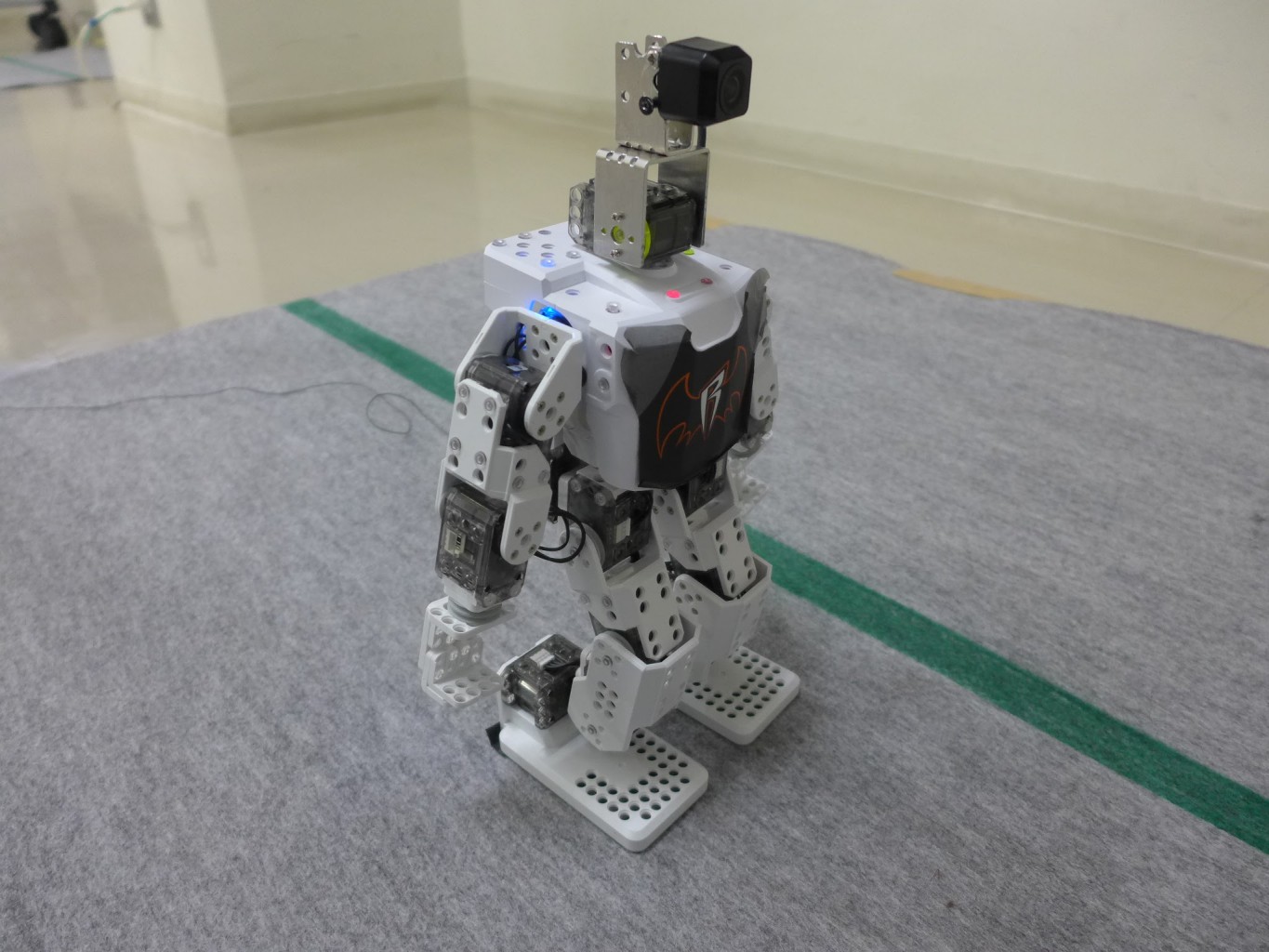
ヒト型レスコン2016から導入された有線カメラのルールを活用するために、大阪電気通信大学 自由工房の協力を得て事例を紹介します。ROBOTIS-MINIの頭部に小型のアナログカメラを搭載し、細いケーブルで映像信号を外部のモニタに伝送しています。カメラの電源はロボット本体から供給しています。
カメラ
ここでは、自動車のバックモニタ用として市販されているカメラを使いました。視野が広く、小さく、安価なものが入手できますので、一つのいい選択肢だと思います。Amazonで2,590円で購入しました。
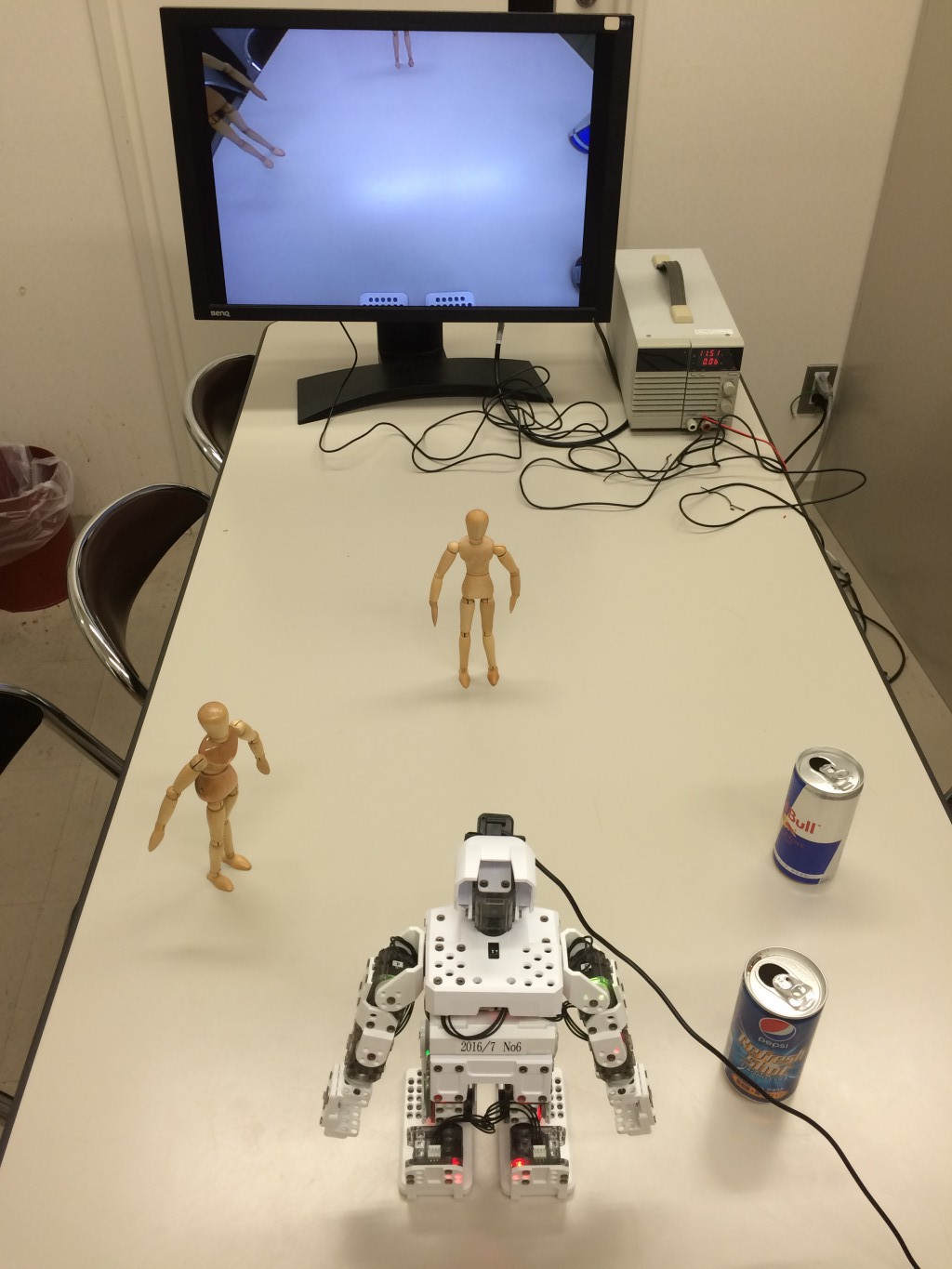
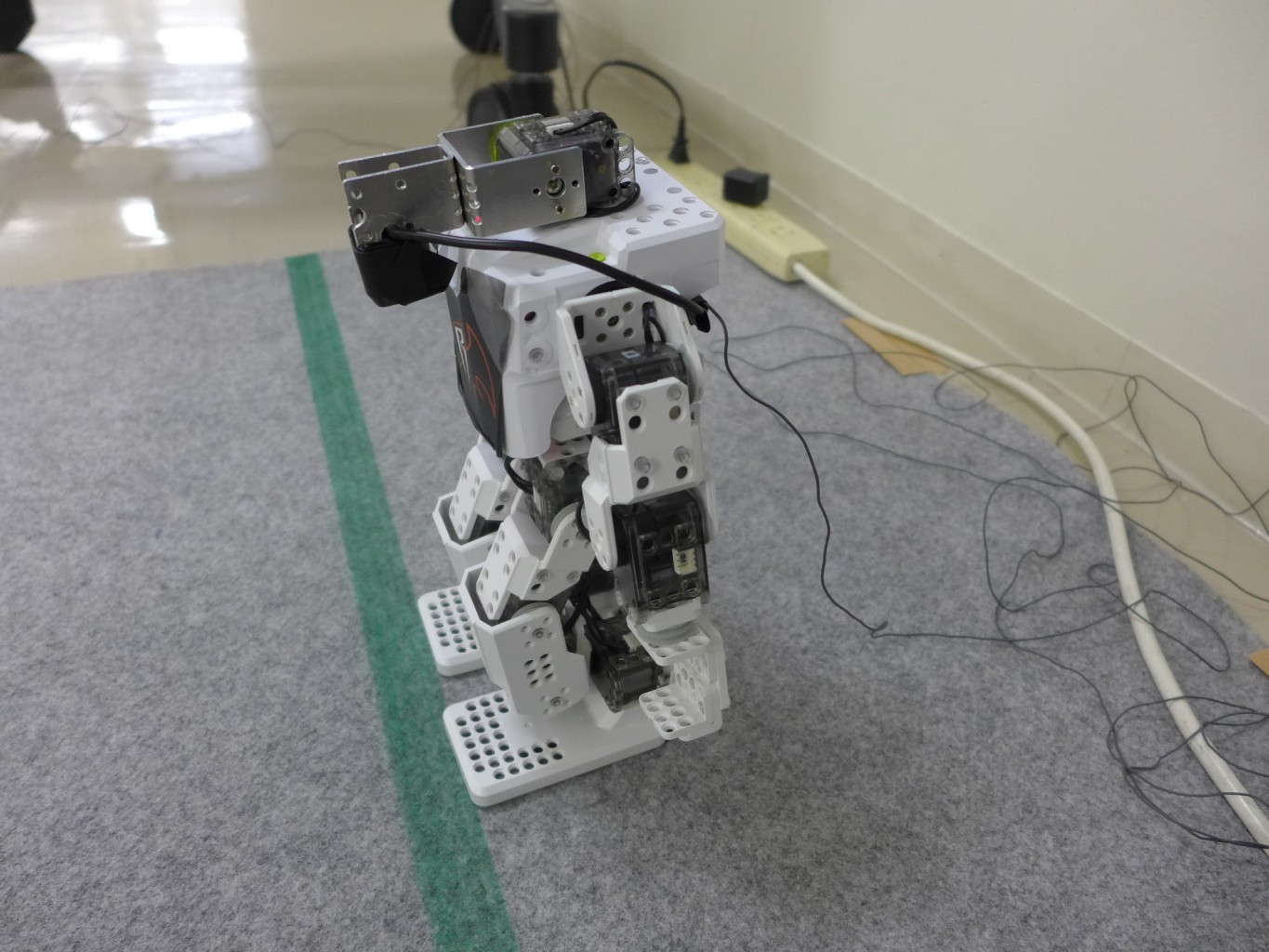
下の写真は、最初に行った仮実験の様子です。カメラをこのように取りつければ(床面からの高さ約230mm)、自分の爪先を見ながら約400mm前方の床面も視野に入ります。


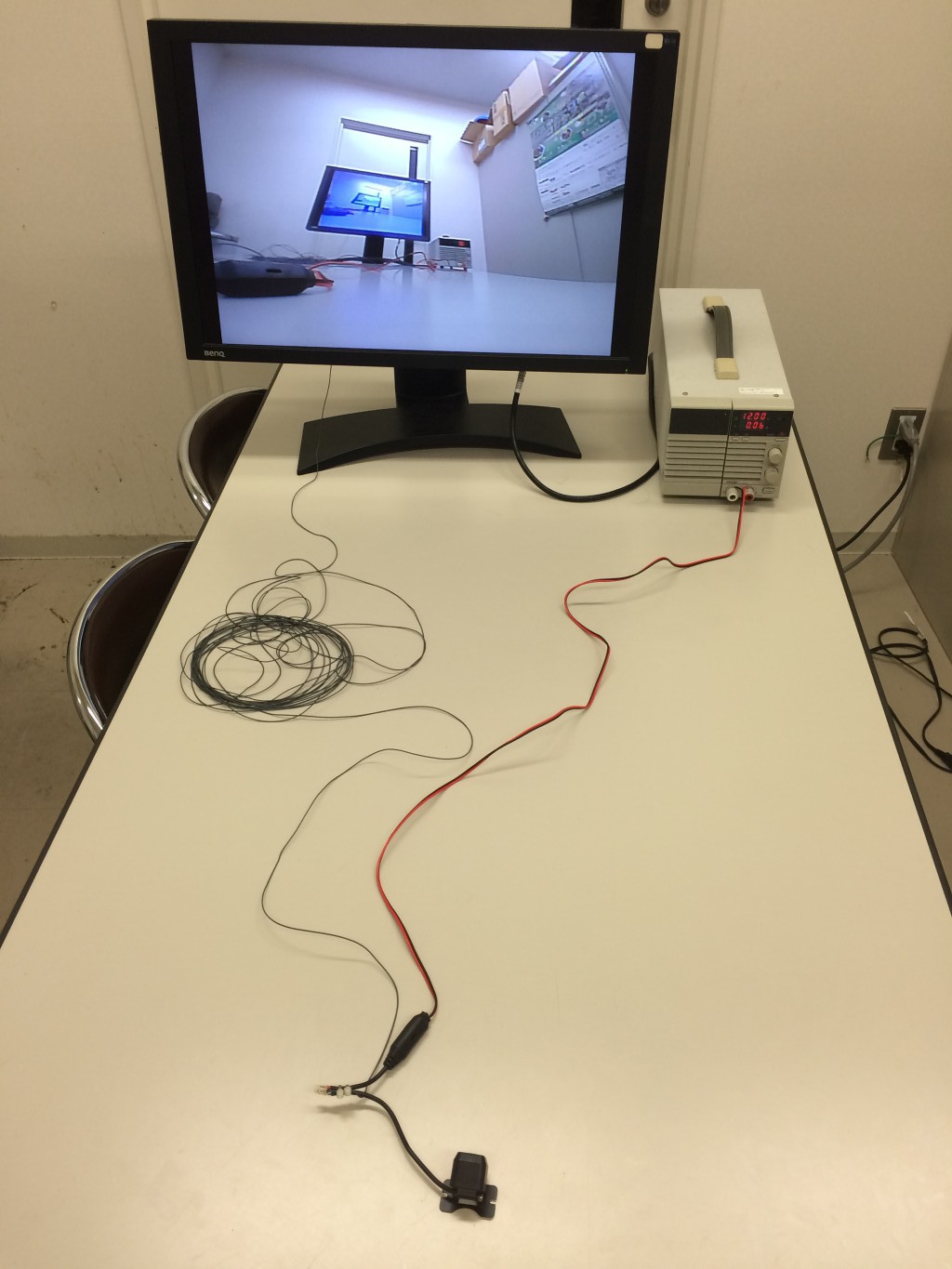
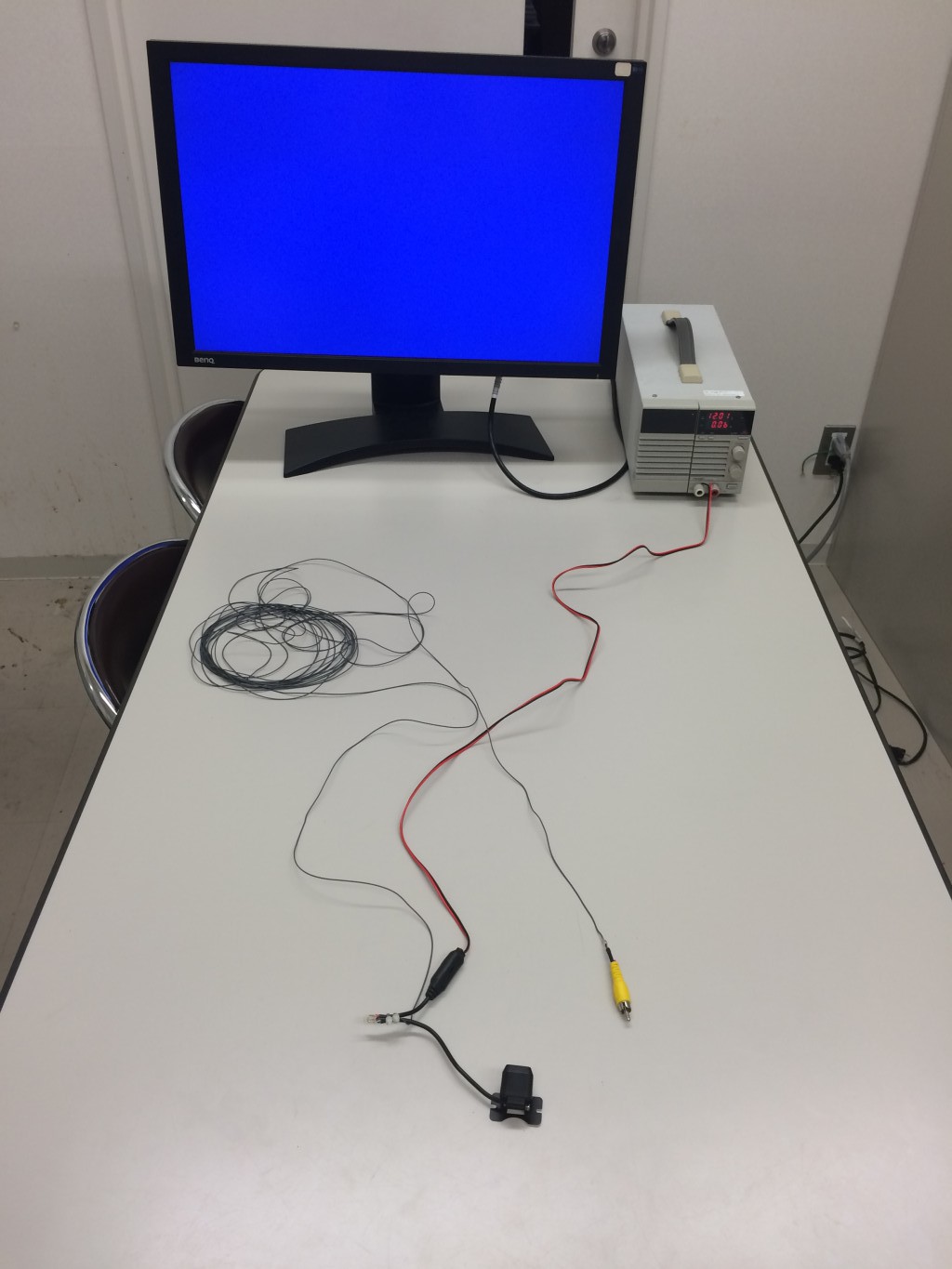
このカメラは、配線によって「正像・鏡像」と「ガイドラインの有無」を切り替えることができます。ここでは正像とガ イドライン無を選びました。ケーブルの途中にある黒い樹脂の塊の中に降圧回路があり3.3Vを作っているようです。電源は12Vと指定されていますが、 6.5Vまで下げてもカメラは正常動作することを確認しました。したがって、2セルや3セルのLiPo電池からも給電できるはずです。ここでは降圧回路を使わず、ロボットのマイコンボードOpenCM9.04の外部機器用電源のポートから3.3Vを直接給電しました。
カメラで足下と遠方を見るために、ロボットの頭部を外し、首関節のピッチ軸を設け、その先にカメラを取り付けるようにしました。以下の動画をご覧ください。
ケーブル
外径0.55mmのシールド線(オヤイデ電気 極細1芯シールド2444、10m 540円)を10m使いコンポジットビデオ信号を伝送しています。映像は少し劣化しますが、遠隔操縦するには困りません。
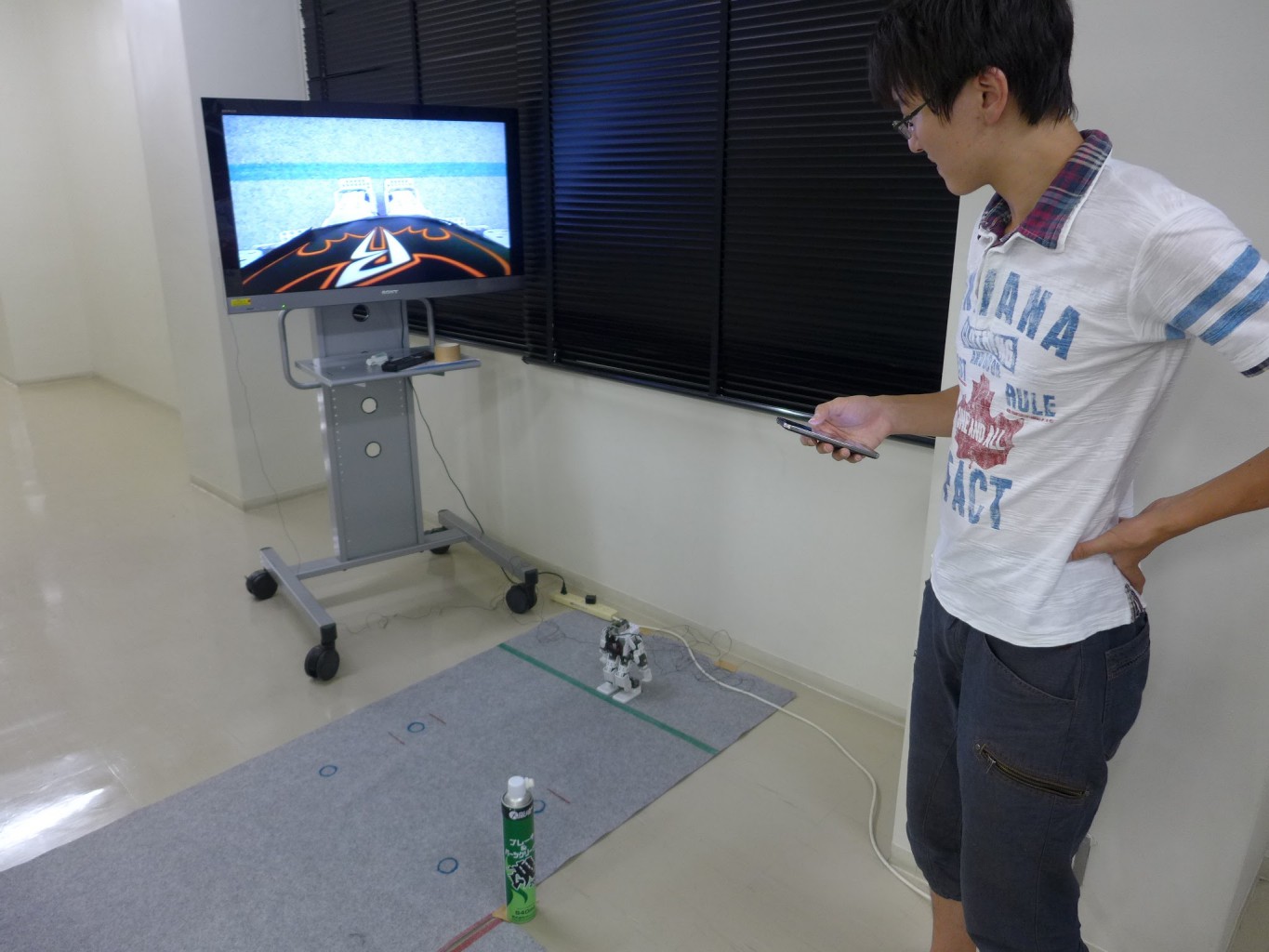
 本格的に有線で運用するには、ロボット側にケーブルのリールを設け、移動しながらケーブルを繰り出していくべきです。しかし、ここで用いたケーブルは大変細くて軽いので、スタート位置に適当に置いておき、ロボットが移動しながら引っ張り出すことができました。ただし、そのままでは、引っ張っているケーブルがフィールドの外部に出てしまいますので、内側のコーナに缶を置いてみました。缶とケーブルが擦れ合っていますが、それでもケーブルを引っ張ることが可能でした。
本格的に有線で運用するには、ロボット側にケーブルのリールを設け、移動しながらケーブルを繰り出していくべきです。しかし、ここで用いたケーブルは大変細くて軽いので、スタート位置に適当に置いておき、ロボットが移動しながら引っ張り出すことができました。ただし、そのままでは、引っ張っているケーブルがフィールドの外部に出てしまいますので、内側のコーナに缶を置いてみました。缶とケーブルが擦れ合っていますが、それでもケーブルを引っ張ることが可能でした。
