
DARWIN-MINI用モーション
ヒト型レスコンに多くの方に参加していただくために、比較的安価で扱いやすいヒト型ロボットのキットDARWIN-MINIのモーション(動きのプログラム)を提供しま す。特別な改造は必要ありませんので、このキットを購入し、提供モーションを導入すれば、すぐに参加可能です(ただし、操縦の練習は必要です)。このモーションは、大阪電気通信大学 自由工房 ヒト型ロボットプロジェクトの牛尾さんと植村さんの協力によって作成しました。
ロボット本体
DARWIN-MINIのキットのほとんどそのままですが、以下の3点を変更しました。
- 83mmのトンネルをくぐるために首を90度横に回転。
- 段差の上で足が滑らないように、足裏の後縁にビニルテープを貼付。
- 要救助者の脇を抱えるために、手の取り付け方向を90度回転。




モーション
ROBOTIS社のモーション作成アプリケーションR+Motion 2.0用のプロジェクトのファイルです。
DARWIN-MINI-rescon-oecu-20150911.mtnx
これは、ROBOTIS社が配布している見本のプロジェクトのモーション名をDr.GIY氏が日本語に置き換えたものを基にしています。モーション番号43番以降にレスコン用のモーションを追加しました。以下の表は、見本のモーションのうちレスコンに使うもの(ボタンに割り当てたもの)1~39番と、レスコン用に作成したモーション43~61の説明です。
| モーション番号 | モーション名 | モーション説明 |
| 1 | 初期姿勢 | ロボットの基本姿勢。 |
| 2 | 起き | 倒れている状態から起き上がる。 |
| 4 | 立ち上がれ | 膝を曲げている状態から立ち上がる。 |
| 15 | 右向け右 | 右を向く。 |
| 16 | 左向け左 | 左を向く。 |
| 17 | 右へ(サイドステップ) | 正面を向いたまま右へ移動する。 |
| 18 | 左へ(サイドステップ) | 正面を向いたまま左へ移動する。 |
| 19 | 前進 | 前に進む。 |
| 20 | 後進 | 後ろへ進む。 |
| 39 | 早い前進 | 早い前進。 |
| 43 | 台上り | 台に上る。背中から台に上る。 |
| 44 | 台前進 | 台の上で足を動かし完全に台に乗る。「台上り」の後に行う。 |
| 45 | 人形搬送 | 人形を引っ掛けたまま後ろ歩行する。 |
| 46 | 人形持ち上げ | 人形を引っ掛けたまま立ち上がる。「人形確保」の後に行う。 |
| 47 | しゃがみ歩き | 人形の後ろから人形の上腕に自分の手を引っ掛ける。 |
| 48 | ほふく前進 | 台をくぐる。足を広げ、床を蹴って進む。「ほふく準備」の後に行う。 |
| 49 | ほふく準備 | 床に仰向けになる。 「ほふく前進」をする前に行う。 |
| 50 | 人形搬送(右旋回) | 人形を引っ掛けたまま右に旋回する。 |
| 51 | 瓦礫除去(右手) | 自分の前方にある瓦礫をどける。右腕を右から左へ動かして瓦礫を左にどける。 |
| 52 | 瓦礫除去(左手) | 自分の前方にある瓦礫をどける。左腕を左から右へ動かして瓦礫を右にどける。 |
| 53 | 瓦礫除去(上1) | 瓦礫の上にある瓦礫をどける。両腕で上にある瓦礫をはさむ。 |
| 54 | がれき除去(上2) | 瓦礫をはさんだまま後ろに倒れることで上にある瓦礫をどける。「瓦礫除去(上1)」の後に行う。 |
| 55 | がれき除去(上3) | がれきを離し蹴り上げがれきを遠くに飛ばす。起き上がり時に瓦礫を蹴り、人形に当たらないようにする。「瓦礫除去(上2)」の後に行う。 |
| 56 | 人形確保 | 人形の両腕に自分の手をひっ掛けることができたら行う。人形を持ち上げるために位置を調整する。 |
| 57 | 右手ひっ掛け | しゃがみ歩きで左手に人形の左腕だけが引っかかった場合に行う。 |
| 58 | 左手ひっ掛け | しゃがみ歩きで右手に人形の右腕だけが引っかかった場合に行う。 |
| 59 | 台前進2 | 台の上で進む。「台前進」の後に行う。 |
| 60 | 台降り | 台の上から降りる。肘をついて台から降りる。降りた後ほふく前進か台移動で台から離れて起き上がる必要あり。 |
| 61 | 人形搬送(左旋回) | 人形を引っ掛けたまま左に旋回する。 |
操縦
AndroidのアプリROBOTIS MINIを使う場合には、画面上でモーションを選ぶボタンの配置を自由に設定できます。また、ボタン上にモーションの名前を表示することができます。Android内のROBOTISのフォルダ内の「ROBOTIS MINI btn.dat」というファイルを以下のファイルに置き換えると、上のモーションを操縦するのに都合のいいボタン配置になります。
実際の画面の例を以下に示します(画像をクリックすると大きな画像が表示されます)。
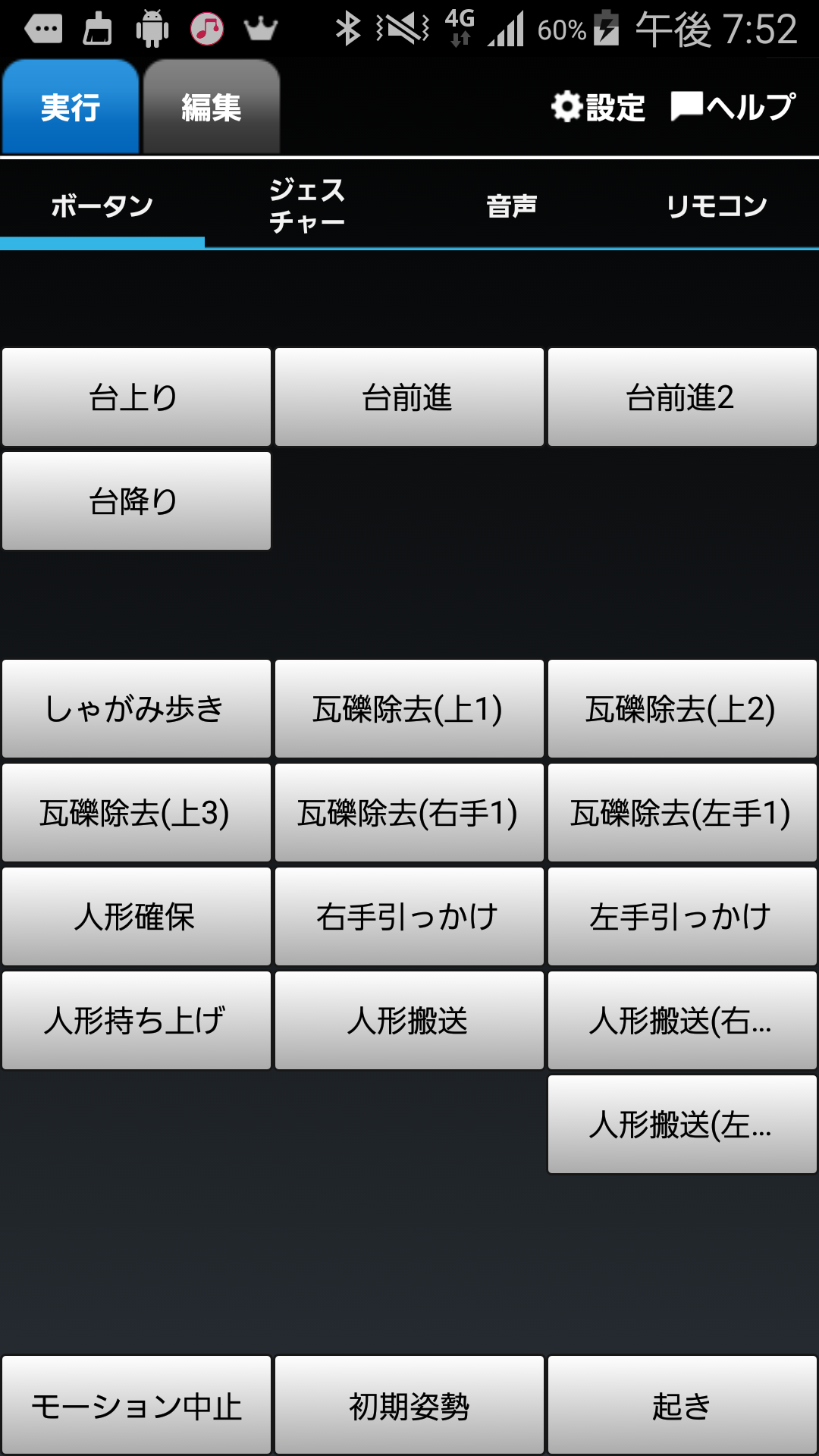
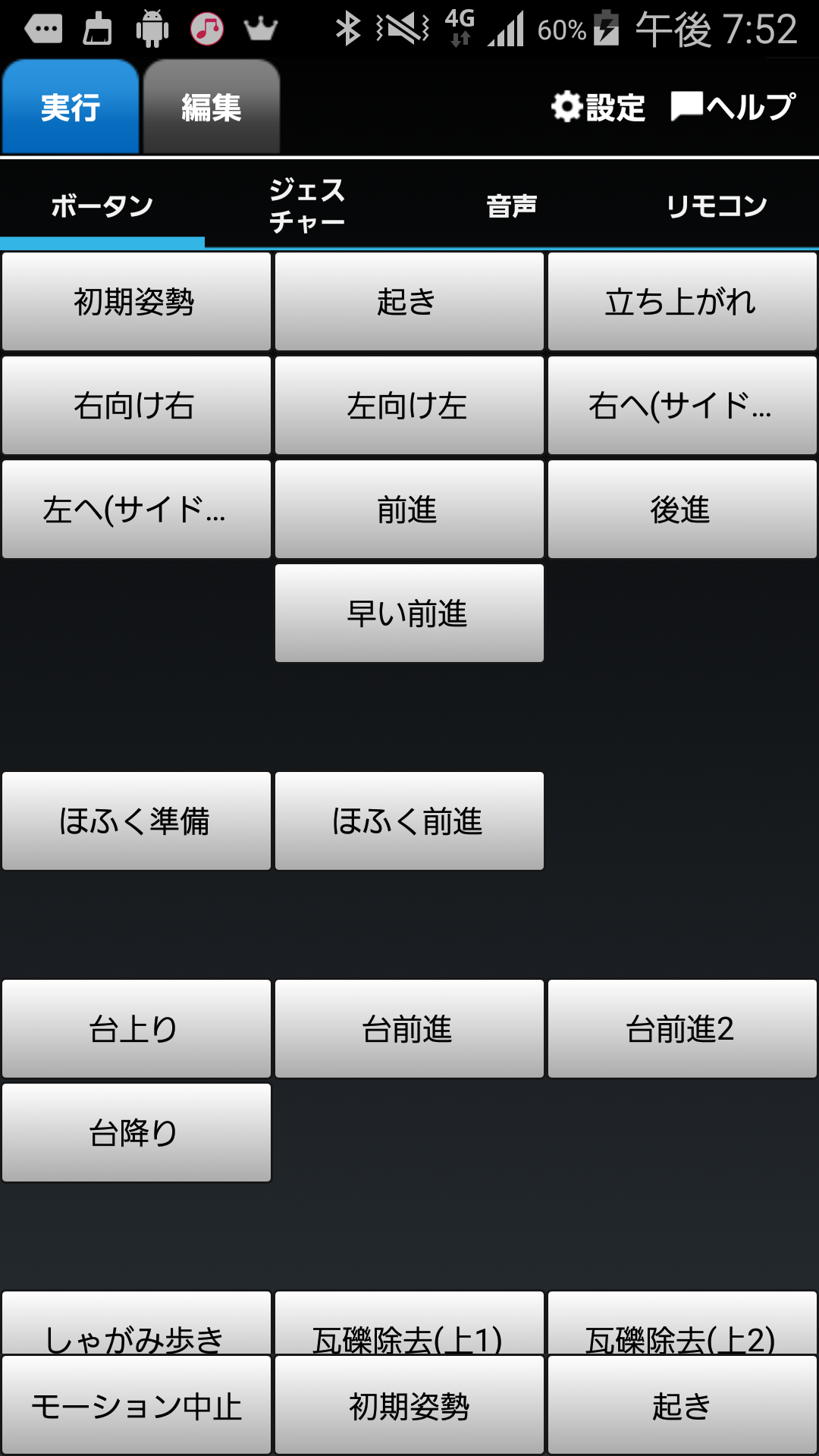
さらに、上述のプロジェクトファイル「DARWIN-MINI-rescon-oecu-20150911.mtnx」をAndroidのROBOTISのフォルダにも入れておき、「設定」のメニューの「モーションファイルの設定」で指定してやると、ボタンを編集する際にモーションリストから選択できるようになります。
なお、PCとAndroid機をUSBで接続する場合に、MTPモードに設定しないと、ROBOTISのフォルダが表示されないことがあるようです。
