
OECU杯 ヒト型レスキューロボットコンテスト 2015 公式レポート
大阪電気通信大学 自由工房ヒト型プロジェクト 技術講師
福田拡司
2015年11月1日、大阪電気通信大学 駅前キャンパスにて「OECU杯 ヒト型レスキューロボットコンテスト 2015」が開催された。このコンテストは「ヒト型ロボットによる災害救助」をテーマとしており、今年で7回目の開催となる。毎年様々な工夫を凝らしたロボットが参加し、今年は12体が競技に参加した(画像1)。
昨年に引き続き、ロボットに搭載したカメラからの映像だけを頼りに操縦する「搭載カメラ部門」と目視によって操縦する「目視部門」の2部門が設けられ、目視部門の第1位は「ゼムネス」、搭載カメラ部門の第1位は「RB2000SF」が獲得した。また、獲得した総合得点が最も高い人に授与されるOECU杯は「ゼムネス」に贈られた。

画像1:本コンテストに参加したロボットと参加者の皆様
競技概要とルール
本コンテストは、2000年から毎年神戸で行われているレスキューロボットコンテストから派生したものである。本家のレスキューロボットコンテストと異なり、本コンテストはヒト型ロボット1台で参加で1人でも参加することが可能である。もちろん、サポートする方を入れて複数人でエントリーしても構わない(画像2)。

画像2:競技前のミーティングに臨む参加者
参加者は被災地に見立てたフィールドで要救助者役の人形を救出し、ゴールに向かう。もちろん救助を素早く行ってゴールするに越したことはないが、救助活動によって要救助者が負傷しまっては本末転倒である。ただゴールに早く向かうだけでなく、安全に要救助者を助けることができるか。救助時の「やさしさ」も大事なポイントである。
ヒト型レスコンの要救助者人形は、本家のものと異なり市販のデッサン人形であり、センサを搭載していない。フィールド上のコース前半部分には小さな台が置かれ、障害物競争のような印象を与える。障害物の大きさは、人間のサイズで考えると身長の半分程になるので、私達にとっては簡単そうに見えるが、ヒト型ロボットにとっては大変な作業なのだ。迅速に、安全に、効率よく救助できるか。ヒト型レスコンではこれらを採点し、点数の高さを競う。
画像3:競技前に確認を行う参加者
競技フィールド
実際に競技が行われるヒト型レスコンのフィールドは画像4のようなコースであり、操縦者を囲むようにコの字型のコースが設置され、薄いパンチカーペットが敷かれている。そこにトンネル、段差、行く手を阻むガレキといった障害物が置かれており、これらを突破する。その先には要救助者を模した人形がガレキに埋もれているため、ガレキを除去して人形を助け出し、ゴールに搬送するという流れとなっている。
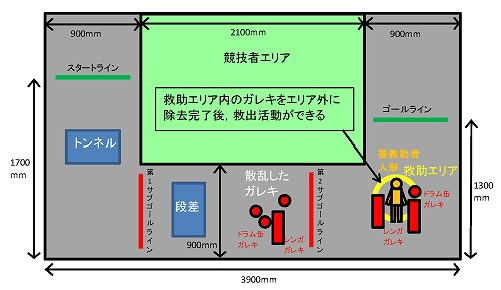
画像4:競技フィールドの画像
2014年までのルールでは、タスクをクリアできないと、次のタスクには進めないようになっていた。しかし2015年のルールでは、各タスクに制限時間が設けられている。制限時間を越えてしまった場合は、そのタスクは失敗となるが、次のタスクに挑戦することができる。これにより、競技者は6分という制限時間の中で全てのタスクに挑戦することが可能になった。
新しいロボット
今回のヒト型レスコンには、新しいタイプの市販ロボットが参入した。おめだま氏のロボット「アクイーア」こと「DARWIN-MINI」である(画像5)。要救助者人形よりも小さい体格でありながら、最後の要救助者搬送まで完遂した。
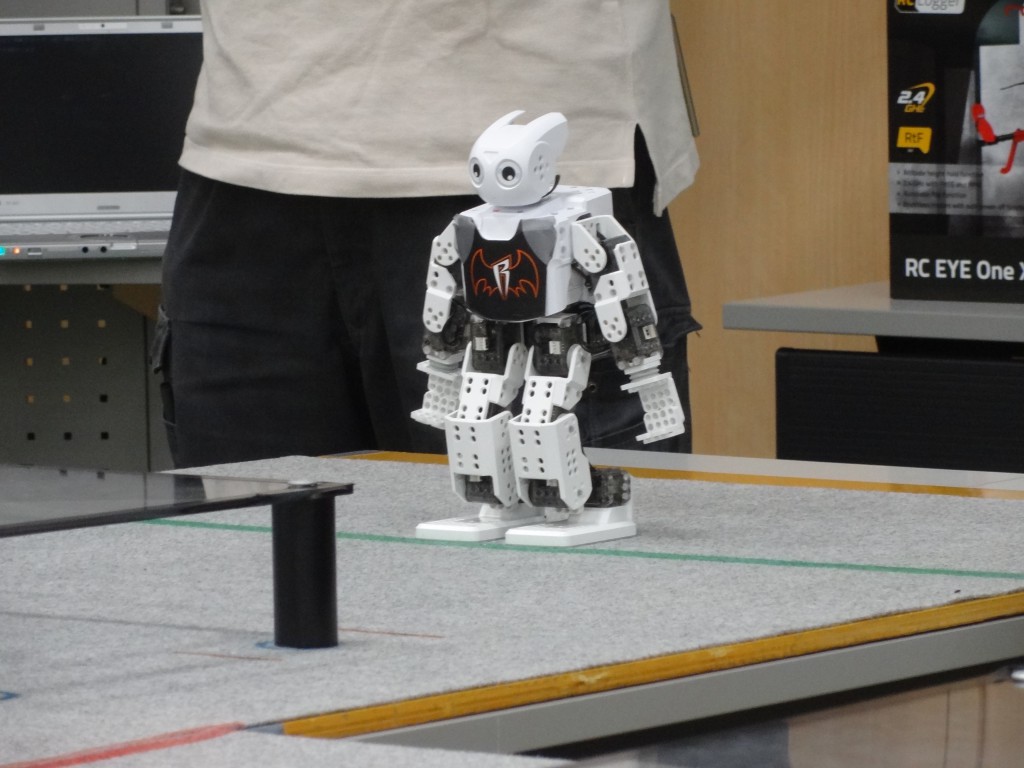
画像5: スタートを待つDARWIN-MINI
このロボットはROBOTIS社製の「ROBOTIS-MINI」を組み立てて、首関節にモータを追加して改造したロボットだ。ほぼ市販のままのロボットでも、モーションを作りこんで練習すれば最後までタスクを達成できることが改めて証明された(画像6)。
実行委員会では、「ROBOTIS-MINI」向けのヒト型レスコン用のモーションを公式ウェブサイトのノウハウ集において公開した。実は、今回コンテストに参加したおめだま氏は、このモーション作成を担当した。この公開により「ROBOTIS-MINI」があれば、ヒト型レスコンに参加できるようになった。「ROBOTIS-MINI」を持っておられる方は、次回の大会に参加してはいかがだろうか。
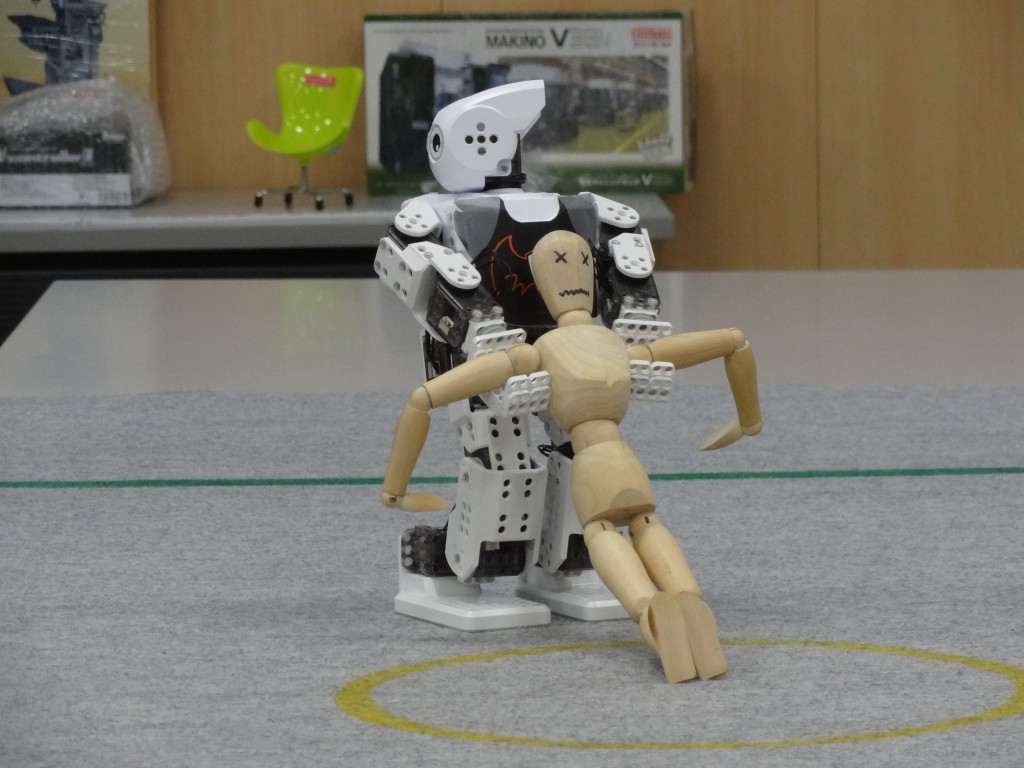
画像6:要救助者を搬送する「DARWIN-MINI」。これと同じ動きが可能になる。
ロボットごとのアプローチ
本コンテストでは、タスクに対しての各ロボットそれぞれでの対応方法や、各ロボットに三つまで使用が許される「道具」の使い方が見所である。
参加ロボットの1体、トランザ-はトンネルくぐりの際に最もポピュラーな道具を用いた。「台車」を用意してその上に寝そべり、足で地面を蹴ることで台車を前に進めて移動する方法である(画像7)。
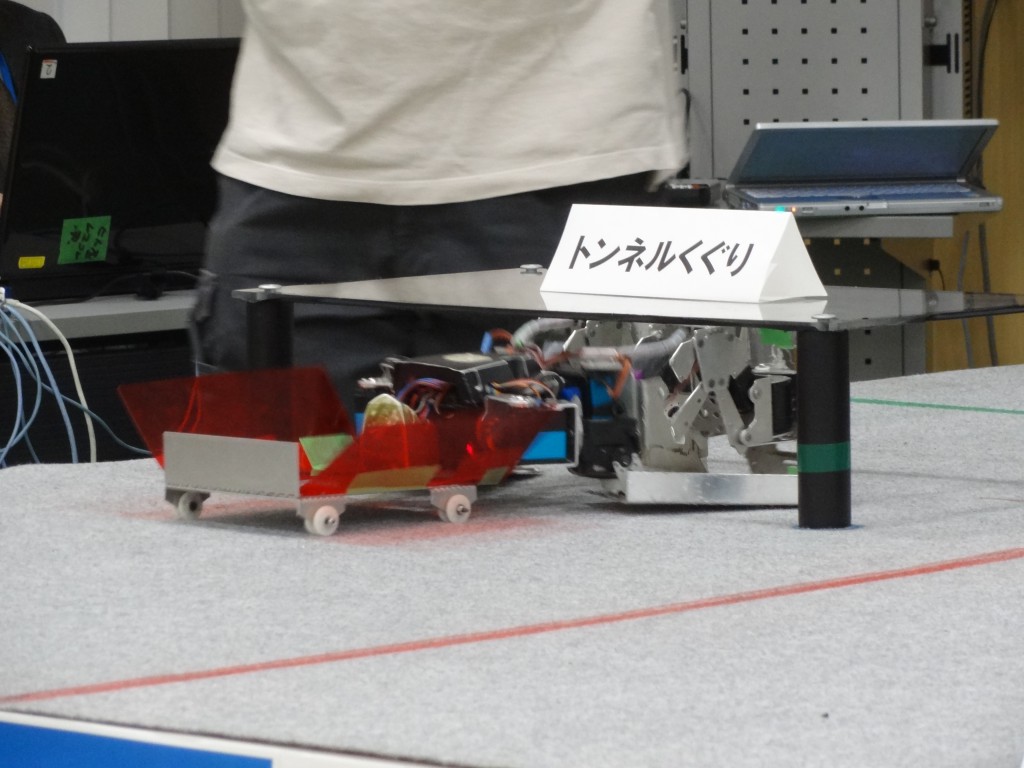
画像7:台車を用いてトンネルくぐりを行うトランザー
前回のチャンピオン、「アクエアレイザーRX」は道具を二つ持ち込んでいた。一つは段差乗り越えに使う階段。台にかけただけのシンプルな階段である。階段を登るロボットは過去のコンテストにも数体いたが、どれも段1つに両足をついてから次の段に登るという方法を取っていた。しかし、今回アクアレイザーRXは段に片足を乗せたら、反対の足は次の段に乗せるという人間と同じ登り方を披露した。確実に段の上まで辿りつけるものではなかったが、動作の作成技術の高さを見せつけていた(画像8)。

画像8:階段を昇るアクアレイザーRX
ただ、このタスクに時間がかかり、救助の要救助者を搬送することができなかった。他に、タオルを用いて要救助者を寝かせ、タオルにつけた金属棒を引っ張って搬送する予定だったが、それは叶わなかった。
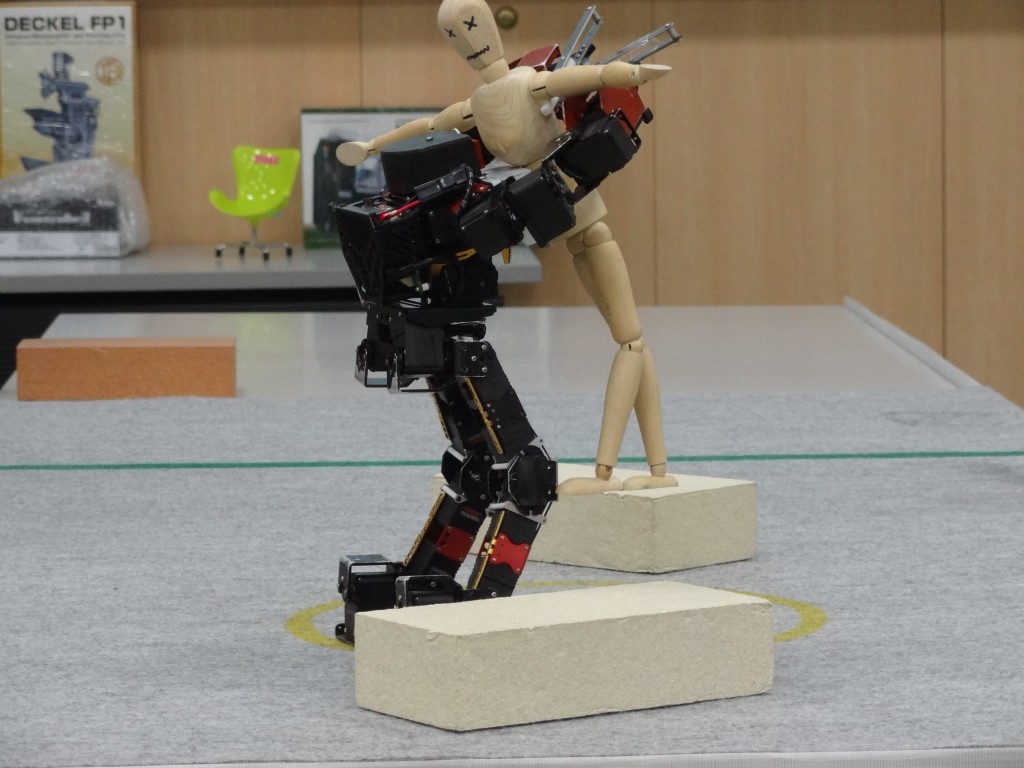
ハードラックは、関西で行われている各種バトル大会に参加している生粋のバトルロボットである。ヒト型レスコンに向けてモノを持ち上げるグリップをつけたり、専用モーションを一新したりと準備をしていた。バトルで高い実力を発揮するこのロボットは、そのスペックを最大限発揮していた。唯一、トンネルくぐりを匍匐前進ではなくしゃがみながらの歩行でクリアし、段差乗り越えを端に片足をひっかけて全身を引き寄せるという持ち前のパワーを活かしてクリアしていった。要救助者も両手で抱え上げていたが、バトル用に使うツメが見えるのだろうか観客席から「痛そう」の声が聞こえていた。オペレータの関氏によれば「要救助者を落とさず、かつ力を加えすぎない最適な位置に調整している」とのことだが、最初に抱え上げているときは見てる方にしてみれば痛そうに映るようだ(画像9)。
画像9:要救助者を抱え上げるハードラック
ラムダは、段差乗り越えに使う台と地面の高さを埋めるために、緩やかなスロープを用意した(画像10)。段差乗り越えのタスクを行う際に台が高いため、その差を埋めるためである。階段を用いるロボットはいるが、スロープを用いたのロボットはラムダが初めてとなる。

画像10:スロープを上るラムダ
KHR-3HVは要救助者人形を抱えて寝転んだまま搬送していた。要救助者を高い位置に持ち上げて二足歩行で運ぶよりも、低い位置で安定して運ぶことができていた(画像11)。
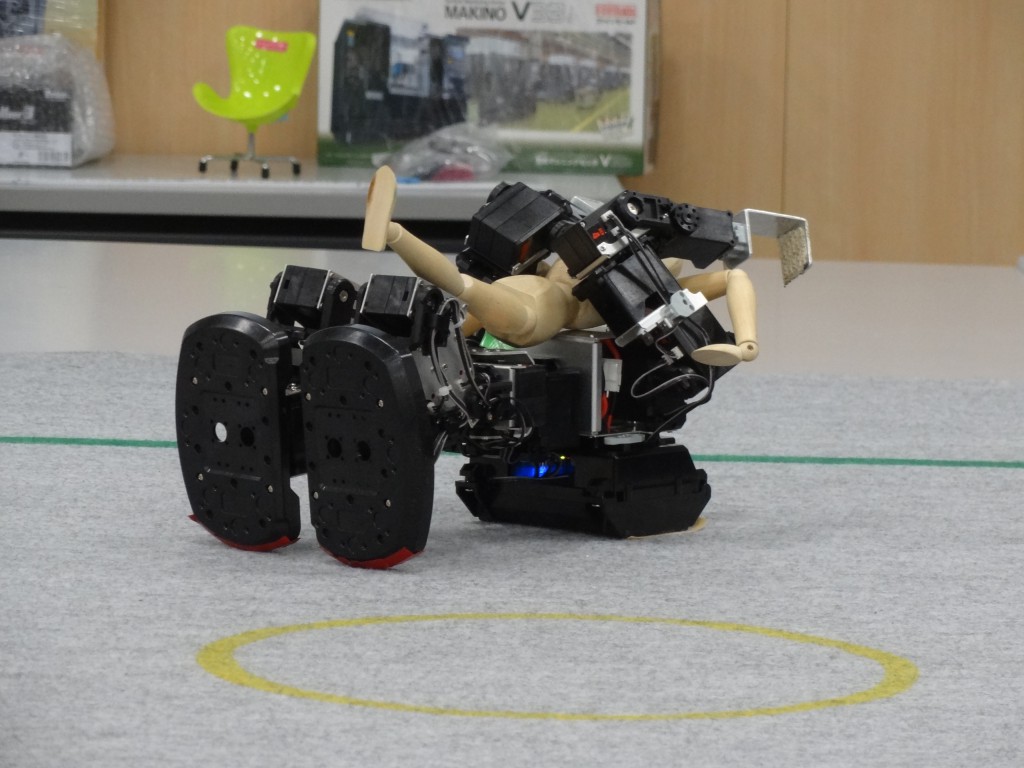
画像11:寝そべって要救助者を搬送するKHR-3HV
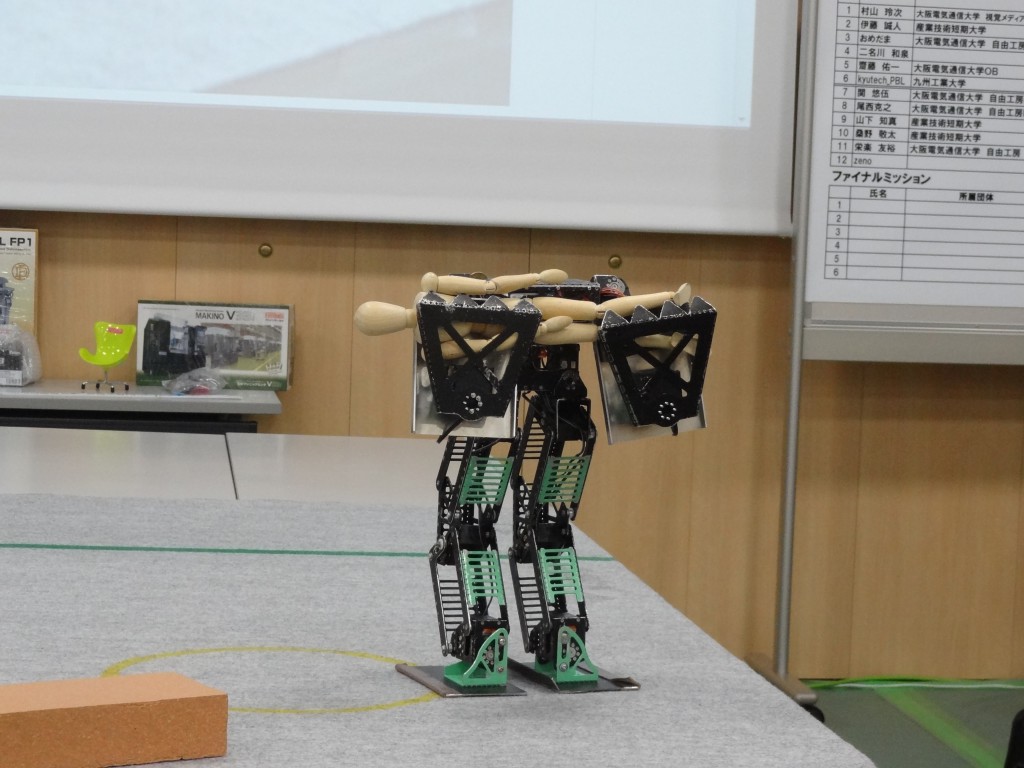
道具の使用が認められている一方で、道具を持ち込まず身一つで救助活動を行うロボットもいる。参加ロボットの1体、ゼムネスは、ROBO-ONE Lightで活躍するバトルロボットだ。フレームを一部作成し直したりと機体の細かい部分をレスコン専用に変更して参加した。道具を一切使わず身一つで救助活動を行ったが、ヒト型レスコン初出場と感じさせない安定した操縦で、各タスクをクリアしていった(画像12)。
画像12:要救助者を抱え上げるゼムネス
カメラ操縦について
今回の搭載カメラ部門の第1位は、この部門にただ1人参加していたzeno氏に決定した。過去の大会でもzeno氏とそのロボットRB2000SFは参加するたびにアプローチ方法を変えてきている。今回は背中部分に新しく「TPIP3」を搭載し、頭部に搭載したカメラの画像をPC上に映すようにしていた(画像13)。
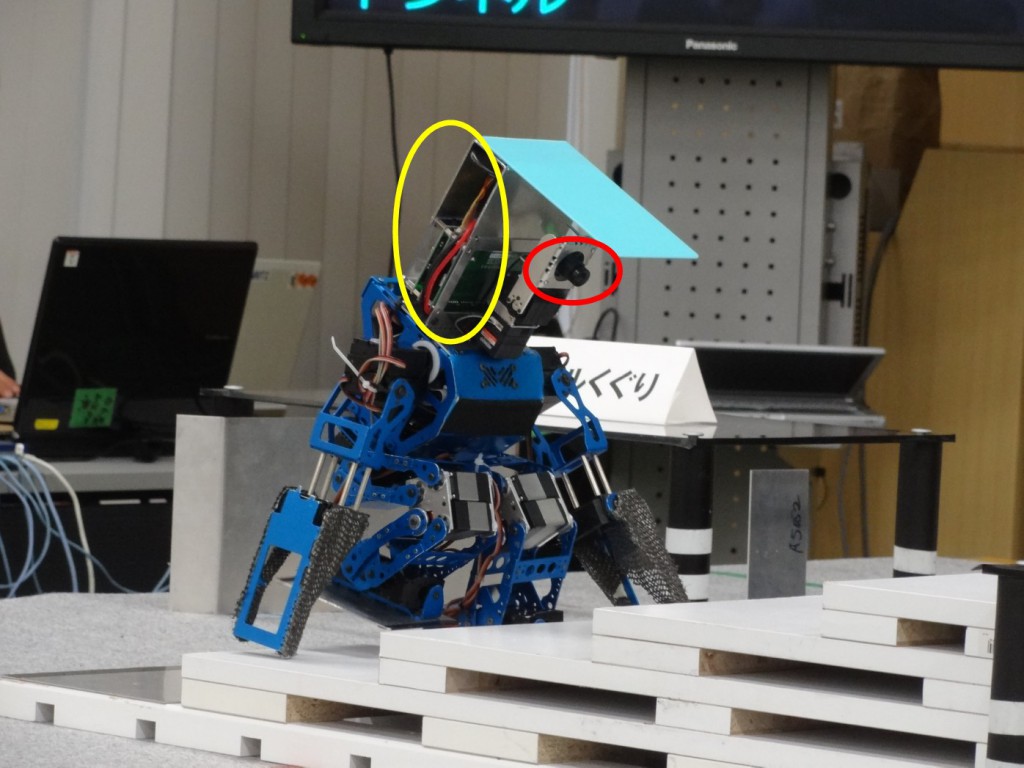
画像13:階段を昇るRB2000SF
ロボットの頭部に搭載しているカメラ(画像13の赤丸)からの画像をTPIP3(画像13の黄丸)で処理し、USB無線LANアダプタから、Adhocで接続しているzeno氏のノートパソコンに映像を送っている(画像14)。このTPIP3は、本家のレスキューロボットコンテストでも「レスコンボード」として用いられている。

画像14:カメラからの映像を映したもの。抱えられている要救助者の胴体が見える。
総括
競技完了後、表彰式が行われ、その中で審査委員長である横小路先生は「全タスクをクリアするロボットが増えて進歩してきているが、ヒト型であることの意味考え、自分が要救助者になったとしてどういう救助方法がよいか考えてほしい」とコメント。実行委員長の升谷先生は「もっと参加者が増えて幅が増える一方で、常連の方々は高みを目指して技術力を磨いてほしい」とコメントした。

画像15:ヒト型レスコン会場の様子
全タスクに挑戦できるルール、ROBOTIS-MINIや、ロボットのバトル大会参加者の参入によって参加ロボットの幅も増え、レベルも上がってきている。今後は道具や操縦技術が上がって、どう「迅速に」、「優しく」救助するかが鍵になっていくだろう。
参考
- OECU杯 ヒト型レスキューロボットコンテスト2015
- OECU杯 ヒト型レスキューロボットコンテスト 2015 ファーストミッション12競技の公式映像
- OECU杯 ヒト型レスキューロボットコンテスト 2015 ファイナルミッション6競技の公式映像
- OECU杯 ヒト型レスキューロボットコンテスト 2015 写真(Facebookのアルバム)
